This week I wanted to test the performance of different protocols and mesh-networks. The two biggest characteristics I wanted to determine were range and throughput. My first test was the ESP-Now protocol, which is a peer-to-peer communication protocol near 2.4 GHz. Outside, with a line of sight, I...
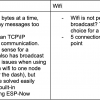
Over the past week, I have been looking into what are the best tools/ways to create a mesh network for our ESP32 boards that will be attached to the blimps. The three frequencies we want to add to diversify are 2.4 GHz, 433 MHz radio, and mmWave 20 GHz. For the 2.4 GHz option, ESP-now looked like...
Dash I worked with the team of undergrads to develop this initial list of requirements for the dashboard. It's based on the kinds of experiments we plan to run and what kinds of data will be relevant. Of course, this is a preliminary list only, but I've specified that we will use modular design so...

In case, we have a limited number of laptops to connect the game controllers and master devices. This experiment shows that multiple game controllers can be connected to the same laptop for communication. The current communication system is limited by the number of ports. We can overcome this limita...

Specifications of the system - Blimp with 2 motors used for horizontal propagation connected to ESP32 microcontroller (Slave Device) NodeMCU with ESP 8266 acting as the master device 2.4GHz with ESP Now protocol is used for communication between the 2 devices A joystick controller is used...

This experiment demonstrates that by using ESP Now protocol we have the capability to control multiple blimps from a single joystick controller. We can switch between different control modes at the click of a button. In the following video - 1 ESP32 microcontroller is connected to the motors. 1...

I was looking for ways to control the motors using peripheral hardware. I initially used Keyboard to control the motors. The input characters were sent to an ESP32 device (Master) via serial communication. The data was sent to another ESP32 device (Slave) connected to the motor drivers. I used a 2.4...
- «
- »